
Written by Paul Gentile
As featured on page 46 the December 2012 issue of Model Aviation.
As featured in the Model Aviation tablet app.
If you look up the definition of a helicopter in a HarperCollins dictionary, it states that a helicopter is “an aircraft that derives its lift from blades that rotate about an approximately vertical central axis.” If you view Merriam-Webster’s online dictionary, it defines a helicopter as “an aircraft whose lift is derived from the aerodynamic forces acting on one or more powered rotors turning about substantially vertical axes.”
Both of these dictionaries also make reference to the origin of the word “helicopter,” which derives from the French word, “hélicoptère,” which was first used in roughly 1887.
By those definitions, a multicopter is a helicopter. Then why is a multicopter so special that it needs its own name?
Multicopters are special and a breed of their own and don’t rely on mechanical swashplates, tail rotors, or coaxial rotors to achieve controlled flight.

A replica of George Cayley’s 1796 helicopter design was made for the National Model Aviation Museum, located in Muncie IN. Photo by Rachelle Haughn.Multicopters do not employ all of the characteristics that Igor Sikorksy captured in the modern helicopter design of the 20th century. If you are thinking that there have been multirotored aircraft such as the V-22 Osprey in service for years, you are correct. However, you would also be wrong. The V-22 is a multirotor, but not a multicopter. The Osprey has its own characteristics and is classified as a tilt-rotor aircraft. Although tilt rotors are part of the multicopter history, they have their own set of design criteria. Tilt rotors are similar to a mix between an airplane and a helicopter, using rotors for lift and using fixed wings and control surfaces during forward flight. There is no dictionary definition for multicopter, so let’s create one. mul·ti·copter, (noun) \’ml-t-käp-tr’\ A heavier-than-air aircraft that has two or more usually symmetrically placed rotors and whose control of pitch, roll, yaw, and lift are achieved solely through the variation of the speed (rpm) of each rotor and whose flight stabilization is through a combination of electro/mechanical sensors and computing devices. Related words: tricopter, quadcopter, hexacopter, octocopter, pluscopter, xcopter, hcopter—referring to specific configurations of the rotors on a multicopter.
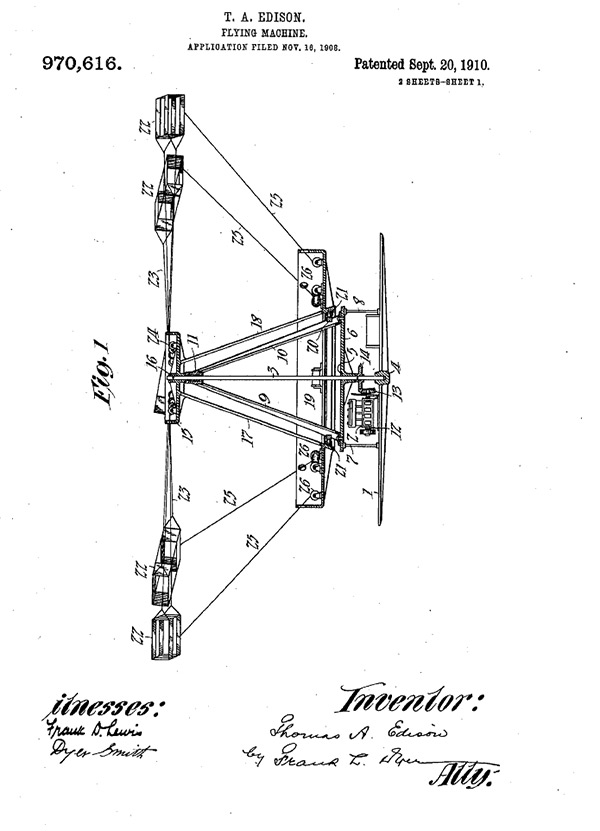
Fascinated with flying, Thomas Edison filed several patents for multi-rotor flying machines. This is one of his patents entitled simply “Flying Machine”n.Flight Theory Although the definition of the multicopter may appear straightforward, the physics of how it flies can be complex. It may not seem that way because only a few components make up a multicopter. Compared to an airplane or a helicopter, the mechanical complexity of a modern multicopter is far less. However, this is where the simplicity ends. There is complex software embedded in the flight controller.
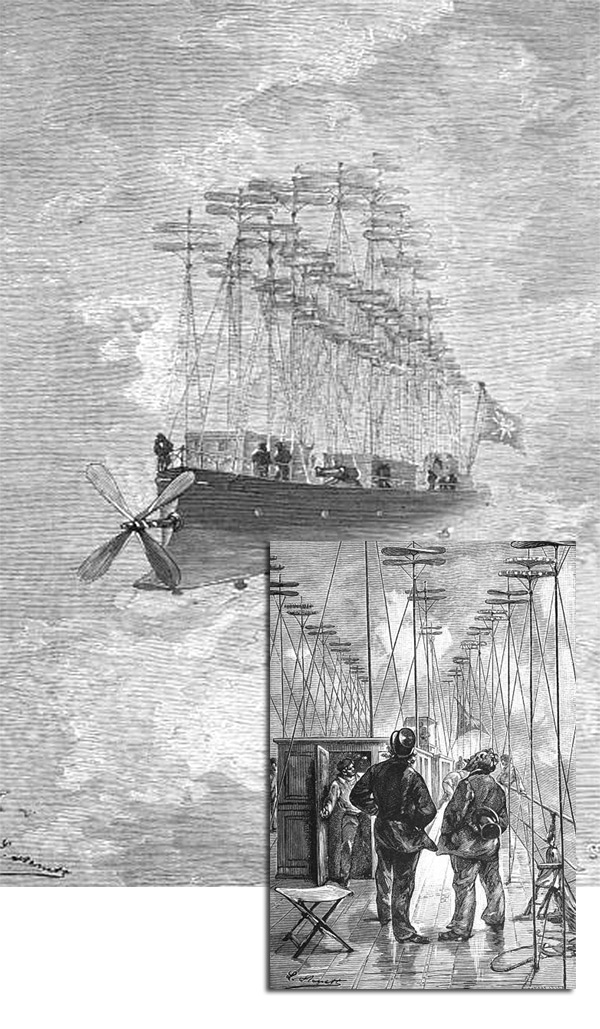
Artistic impressions of the Albatros from the Jules Verne book, Clipper of the Clouds. Flying with 37 rotors would make it the forerunner to today’s multicopter.Attaching four or more propellers to some motors and some sticks does not work. I have tried it and am sure that many have tried something like that. The reason it does not work is that without a flight controller, there is no balance or control of the forces that are being generated by each motor and propeller. A multicopter at rest has a net sum of zero forces. Each motor and propeller combination, or rotor, can create thrust and rotational torque. When combined, these two forces allow the multicopter to achieve lift, yaw, and roll. Lift on the multicopter is generated by the thrust of each rotor. If one were to eliminate gravity, drag, wind, and any other forces and equally generate thrust from all rotors, a multicopter should fly up (the opposite direction of the force of the thrust) and continue straight up. If gravity is added into the equation, then the thrust must overcome the force of gravity on the aircraft. When thrust and gravity are equal, you can hover level.
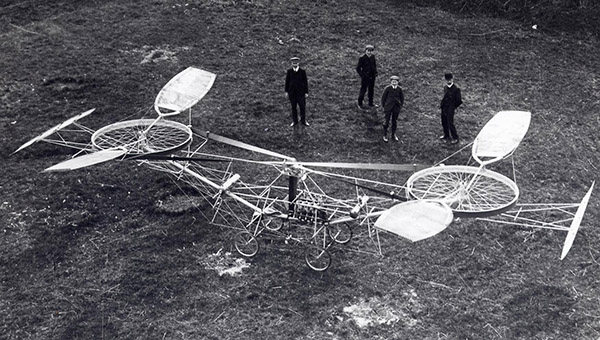
Paul Cornu and his 1907 twin-rotor aircraft, credited as the first to successfully carry a human for 20 seconds.Directional flight of a multicopter is achieved by varying the thrust produced by one or more of the rotors. For a tricopter to fly forward, for example, the front rotor spins slower and the rear rotors spin faster, thus changing the attitude and pitch of the aircraft. The thrust of all of the rotors would be at an angle and push it forward. On a traditional helicopter, the tail rotor is the counterbalance for the rotational torque generated by the main rotor. On a coaxial helicopter, the opposite spinning rotors balance the rotational torque forces. The sum of the rotational torque generated by all of the rotors controls the rotation of a multicopter. Rotating or yawing a multicopter requires changing the rotational torque of each rotor so there is a positive amount of total rotational torque in the direction the pilot wants to yaw. The rpm of the rotors must be changed to allow the effects of torque to take place. When a multicopter is hovering level and still, the sum of all of the rotational torque is zero. If you want to rotate the aircraft left or right, you need to speed up and slow down each rotor. Slowing down certain rotors also reduces thrust. Changing the rpm of a rotor alters the thrust generated by the rotor. Anyone who tries to quickly spin a multicopter will notice a drop in altitude until either thrust is added, or the flight controller adjusts the thrust. To stay in flight and yaw at the same time, certain rotors need to spin fast enough to compensate for the lost thrust of the rotors that are slowing down. During a typical flight, the aircraft pitches, yaws, and rolls at the same time—increasing the complexity. Something is missing: the flight control loop. A multicopter tries to fall out of the air every moment. Why are muticopters so stable in flight? The answer is in the flight controller, which continuously evaluates all of the forces acting on the multicopter and receives control commands. The control loop has to make these evaluations and adjustments faster than the effects of each of the forces. The speed at which the control can repeat is called the control loop resolution, and is apparent in the altitude drop I previously mentioned. When a multicopter yaws, the compensation needed in thrust happens when the control loop senses a change in the forces affecting altitude. If the change is too slow, the multicopter can lose altitude and crash. If the change is too fast, the muticopters do a weird oscillation and continuously try to readjust.

Paul Michael Gentile, the author’s son, uses a MacBook, an Xbox controller, and Drone Station software to fly the AR.Drone. Pilots have plenty of choices to control their aircraft.Components and Configuration Multicopters come in all shapes and sizes. Although there are configuration differences, they all have the same basic components: pilot command and control, motors, propellers, ESCs, a frame, and a flight control module. Depending on how advanced you want to be, multicopters may also have video cameras, GPS, compasses, barometers, sonar sensors, and telemetry. Often, many of the sensors and secondary options are built into the flight controller, which also houses the electronic gyros and accelerometers found on most multicopters. According to our definition of a multicopter, they have two or more symmetrically placed rotors. The amount of rotors and the flight configuration of the multicopter will also determine the subclass of multicopter.

Bell-X22A – Quadrotor Ducted Fan for VSTOl Take off and Jet Engines for forward propulsion.
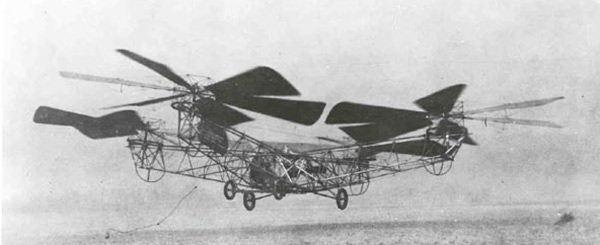
“Flying Octopus” Quadrotor designed by George De Bothezat – Feb 1923

The Curtiss-Wright VZ-7 “Flying Jeep” saw service in the U.S. Army from 1958 until 1960.
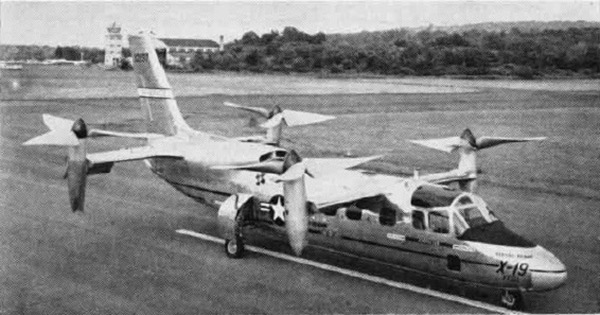
Curtis-Wright X-19 four rotor tilt aircraft. 1963.For example, a four rotor is a quadcopter and it can fly in “+,” “X,” or “H” configuration. Rotors also can be set in single or coaxial, upper, and lower configurations. A six-bladed hexacoptor could be in a “Y” configuration or in a symmetrical configuration. Begin adding or subtracting rotors and you will see that a picture is worth a thousand words. I have included a diagram of some multicopter rotor configurations. Exact rotor placement and orientation depend on the flight controller being used. Although most configurations limit multicopters from two to eight rotors, the Distributed Flight Array (DFA) may change that paradigm. The Swiss Federal Institute of Technology Zurich is experimenting with the DFA in its Institute for Dynamic Systems and Control. According to the institute’s website, the “Distributed Flight Array is a flying platform consisting of multiple autonomous single propeller vehicles that are able to drive, dock with their peers, and fly in a coordinated fashion.” The DFA could have two, three, four, or 40 or more rotors. Each rotor can operate independently and, when needed, the rotors can link up and fly as a unit. The institute has been experimenting with the DFA for several years and has already produced several versions. Pilot command and control uses the same radio transmitter configuration that has been used for approximately the last 60 years. RC technology has evolved from one channel to multichannel, and from AM, FM, and PPM to 2.4 GHz, but the same “sticks in a box” remains. Multicopters have introduced a host of new options for pilot control. Multicopters such as the Parrot AR.Drone allow a pilot to use a smartphone, a tablet, a laptop, or a video game controller such as those used for the Nintendo Wii, Sony PlayStation 3, or Microsoft XBOX 360. Young pilots who have grown up with these devices are finding them more familiar and easier to use. Smartphones, tablets, and laptops allow pilots to control advanced features such as photography or video recording, telemetry, and autopilot functionality. The RC transmitter still reigns king, though. Weight is the enemy of any aircraft and multicopters are no exception. Airframes for multicopters need to be strong to avoid twisting under the load of all the opposing forces, and lightweight enough to not impact flight characteristics. Frame options range from the do-it-yourself, made from off-the-shelf components found in the local home improvement shop, to high-end, carbon-fiber designs. There is a range of multicopter frames available for a reasonable price from your favorite hobby centers such as BP Hobbies or Atlanta Hobby. During my multicopter control boards testing, BP Hobbies supplied me with laser-cut wood frames. To my surprise, the frames survived my lack of skill. They were lightweight, yet rigid enough in flight and soft enough for some rough landings. Motors, ESCs, batteries, and propeller choices for multicopters require skill and research. Although most airplanes fly with a wide range of propeller choices, multicopters are more peculiar. Pitch and diameter are important in determining thrust. A propeller that is too big requires more energy to spin up or down. The amount of power needed to spin the propellers will impact flight time and flight characteristics. LiPo batteries and ESCs must be matched to the motor and propeller selection or you could risk damaging components or losing your multicopter in midair. Unlike an airplane that can dead-stick or a helicopter that can autorotate, a multicopter with no power has the flight characteristics of a brick. Most multicopters have enough flight history that choosing these components is as easy as reading pilot recommendations. The most important choice for your multicopter is the flight controller. Many feature and function choices for do-it-yourself multicopters are available in a wide price range. Every flight controller has a set of gyros in at least three axes: X, Y, and Z. At the heart of the flight controller is a microcontroller or computer chip that receives all the inputs from the pilot and the onboard sensors, which determine each rotor’s function. Let’s review the functions offered by most flight controllers. Bill at oddCopter.com has done a great job of defining the key features that are available today, and has posted a chart online. See “Sources” for his website address.
• Gyro stabilization: The ability to easily keep the copter stable and level under the pilot’s control. This is a standard feature of all flight control boards.
• Self-leveling: The ability to let go of the pitch and roll stick on the transmitter and have the copter stay level.
• Carefree: The pilot can control the copter as if it is pointing in its original direction, as the orientation of the copter changes.
• Altitude hold: The ability to hover a certain distance from the ground without needing to manually adjust the throttle.
• Position hold: The ability to hover at a specific location.
• Return home: The ability to automatically return to the point where the copter initially took off.
• Waypoint navigation: The ability to set specific points on a map that the copter will follow as part of a flight plan.

The Draganflyer X6 is a long way from the original 2001 DraganFly.

The Draganfly Handheld Remote Groundstation demonstrates how Multicopters are changing all facets of aviation.

The Snelflight HoverFly was released in 1997 and kickstarted a whole new genre of commercially available multicopters. The HoverFly was stable and easy to fly.Component selection can be a daunting task. Begin with a plan, conduct research, and ask questions. Many in the multicopter community are willing to help. An octocopter with GPS and 14-inch propellers is not for the living room, and a micro quadcopter that weighs 2 ounces with no self-leveling is not a good outdoor camera platform. As with any tool, you need the right one for the job. —Paul Gentile
[email protected]
Twitter @TheHobbyGuy
http://TheHobbyGuy.me SOURCES:
oddCopter
http://oddcopter.com/flight-controllers AR.Drone
www.ardrone.parrot.com BP Hobbies
(908) 431-5603
www.bphobbies.com Atlanta Hobby
(678) 513-4450
www.atlantahobby.com
Similar Articles
 RC Helicopters Debut at 1978 Nats
RC Helicopters Debut at 1978 NatsWritten by Dave Chesney Model Aviation Archives, November 1978

Written by Jay Smith As featured on page 46 the November 2012 issue of Model Aviation. As featured in the Model Aviation tablet app.
Written by Jennifer Orebaugh As featured on page 39 the December 2012 issue of Model Aviation. As featured in the Model Aviation tablet app.








Comments
Rise of the Multicopter | Model Aviation
There are actually game titles to accommodate everybody's pursuits; battling, cooking food, educational,
very first person photographers, as well as quite a few much more.
The game play is action adventure game having open world
environment, heavily inspired by grand theft auto where you could steal car, shoot
people, and do plenty of thing you'd like. Originally released on PS2
where sales were hugely underwhelming, Capcom gave Okami a second chance on Wii due to fans outcries that the games paintbrush mechanics would ideally be suited to the wiimote's capabilities.
Rise of the Multicopter | Model Aviation
Tissue box spy camera,Toothbrush spy camera,Shower spy camera,Razor
spy camera. Sometimes winning at Roulette is not lose all
of your money. You also have the opportunity to send only high-definition web streaming,
which is the most common method of transmission of media files in real-time
across the Internet.
Rise of the Multicopter | Model Aviation
There are actually game titles to accommodate everybody's pursuits; battling, cooking food, educational, very first person photographers, as well as
quite a few much more. What Playstation 1 games do you miss most and would
recommend to all gamers out there. Faster Gameplay – Right, Left, Left, Down, Up, X, Down, and Left.
Add new comment