Image

As featured in the Model Aviation tablet app. Multicopters are special and a breed of their own and don’t rely on mechanical swashplates, tail rotors, or coaxial rotors to achieve controlled flight.
Image

A replica of George Cayley’s 1796 helicopter design was made for the National Model Aviation Museum, located in Muncie IN. Photo by Rachelle Haughn.Multicopters do not employ all of the characteristics that Igor Sikorksy captured in the modern helicopter design of the 20th century. If you are thinking that there have been multirotored aircraft such as the V-22 Osprey in service for years, you are correct. However, you would also be wrong. The V-22 is a multirotor, but not a multicopter. The Osprey has its own characteristics and is classified as a tilt-rotor aircraft. Although tilt rotors are part of the multicopter history, they have their own set of design criteria. Tilt rotors are similar to a mix between an airplane and a helicopter, using rotors for lift and using fixed wings and control surfaces during forward flight. There is no dictionary definition for multicopter, so let’s create one. mul·ti·copter, (noun) \’ml-t-käp-tr’\ A heavier-than-air aircraft that has two or more usually symmetrically placed rotors and whose control of pitch, roll, yaw, and lift are achieved solely through the variation of the speed (rpm) of each rotor and whose flight stabilization is through a combination of electro/mechanical sensors and computing devices. Related words: tricopter, quadcopter, hexacopter, octocopter, pluscopter, xcopter, hcopter—referring to specific configurations of the rotors on a multicopter.
Image
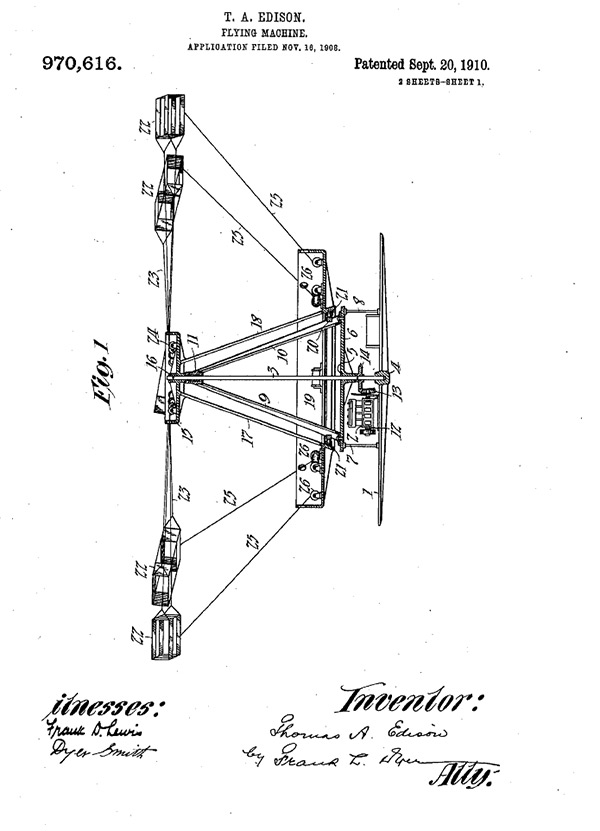
Fascinated with flying, Thomas Edison filed several patents for multi-rotor flying machines. This is one of his patents entitled simply “Flying Machine”n.Flight Theory Although the definition of the multicopter may appear straightforward, the physics of how it flies can be complex. It may not seem that way because only a few components make up a multicopter. Compared to an airplane or a helicopter, the mechanical complexity of a modern multicopter is far less. However, this is where the simplicity ends. There is complex software embedded in the flight controller.
Image
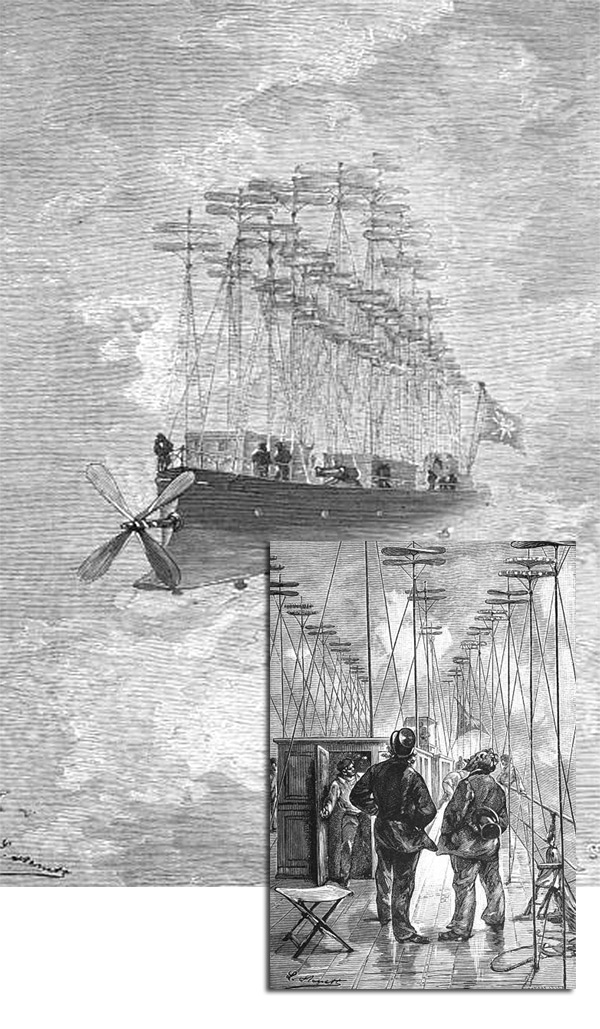
Artistic impressions of the Albatros from the Jules Verne book, Clipper of the Clouds. Flying with 37 rotors would make it the forerunner to today’s multicopter.Attaching four or more propellers to some motors and some sticks does not work. I have tried it and am sure that many have tried something like that. The reason it does not work is that without a flight controller, there is no balance or control of the forces that are being generated by each motor and propeller. A multicopter at rest has a net sum of zero forces. Each motor and propeller combination, or rotor, can create thrust and rotational torque. When combined, these two forces allow the multicopter to achieve lift, yaw, and roll. Lift on the multicopter is generated by the thrust of each rotor. If one were to eliminate gravity, drag, wind, and any other forces and equally generate thrust from all rotors, a multicopter should fly up (the opposite direction of the force of the thrust) and continue straight up. If gravity is added into the equation, then the thrust must overcome the force of gravity on the aircraft. When thrust and gravity are equal, you can hover level.
Image
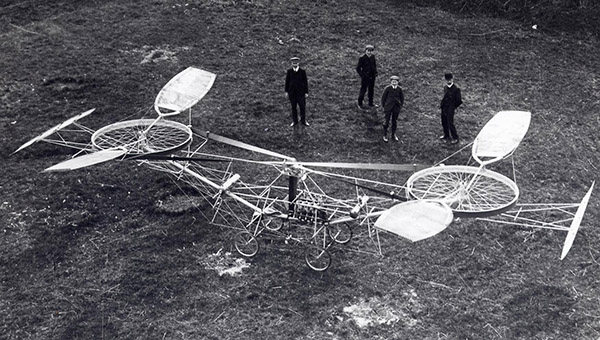
Paul Cornu and his 1907 twin-rotor aircraft, credited as the first to successfully carry a human for 20 seconds.Directional flight of a multicopter is achieved by varying the thrust produced by one or more of the rotors. For a tricopter to fly forward, for example, the front rotor spins slower and the rear rotors spin faster, thus changing the attitude and pitch of the aircraft. The thrust of all of the rotors would be at an angle and push it forward. On a traditional helicopter, the tail rotor is the counterbalance for the rotational torque generated by the main rotor. On a coaxial helicopter, the opposite spinning rotors balance the rotational torque forces. The sum of the rotational torque generated by all of the rotors controls the rotation of a multicopter. Rotating or yawing a multicopter requires changing the rotational torque of each rotor so there is a positive amount of total rotational torque in the direction the pilot wants to yaw. The rpm of the rotors must be changed to allow the effects of torque to take place. When a multicopter is hovering level and still, the sum of all of the rotational torque is zero. If you want to rotate the aircraft left or right, you need to speed up and slow down each rotor. Slowing down certain rotors also reduces thrust. Changing the rpm of a rotor alters the thrust generated by the rotor. Anyone who tries to quickly spin a multicopter will notice a drop in altitude until either thrust is added, or the flight controller adjusts the thrust. To stay in flight and yaw at the same time, certain rotors need to spin fast enough to compensate for the lost thrust of the rotors that are slowing down. During a typical flight, the aircraft pitches, yaws, and rolls at the same time—increasing the complexity. Something is missing: the flight control loop. A multicopter tries to fall out of the air every moment. Why are muticopters so stable in flight? The answer is in the flight controller, which continuously evaluates all of the forces acting on the multicopter and receives control commands. The control loop has to make these evaluations and adjustments faster than the effects of each of the forces. The speed at which the control can repeat is called the control loop resolution, and is apparent in the altitude drop I previously mentioned. When a multicopter yaws, the compensation needed in thrust happens when the control loop senses a change in the forces affecting altitude. If the change is too slow, the multicopter can lose altitude and crash. If the change is too fast, the muticopters do a weird oscillation and continuously try to readjust.
Image

Paul Michael Gentile, the author’s son, uses a MacBook, an Xbox controller, and Drone Station software to fly the AR.Drone. Pilots have plenty of choices to control their aircraft.Components and Configuration



Comments